Speedy Sea Scanner
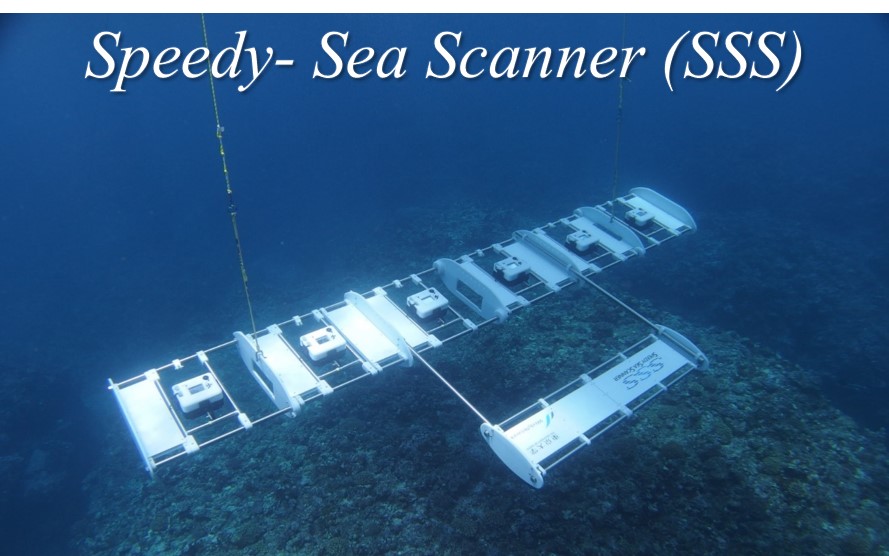
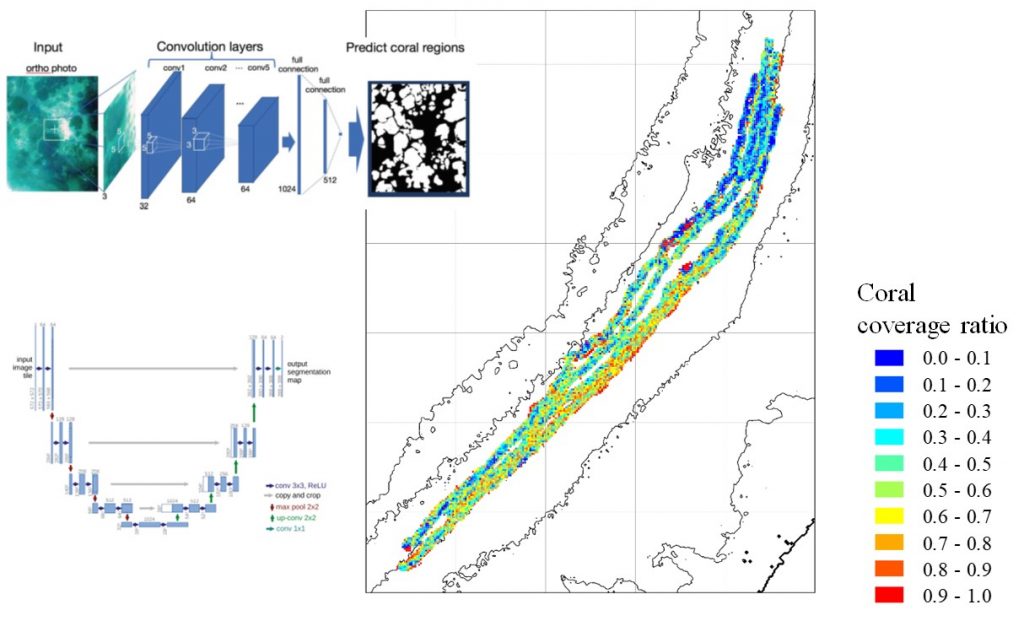
当研究室は、海底を効率よく調査し、サンゴ分布範囲を自動で算出する新しい海底環境調査ツール(SSS: Speedy Sea Scanner)を開発しました。本システムは、水中一眼レフカメラ6台と専用のフレームから構成された曳航式のカメラアレイシステムであり、小型船で曳航しながら海底を撮影することで、短時間で広い範囲の連続した海底写真を得ることができます。様々な沿岸域においてその実証試験を実施し、その調査効率は約12,000 m2/時間で、従来のダイバーによる調査の約80倍、海中ロボットによる調査の約5倍であることが示されました。また、今回の試験で得られた30,957枚の連続写真に対して、色調補正、位置情報を付加した後に、SfM(Structure from Motion)を利用して、極めて高精細な海底の3次元モデル(解像度1 cm)や2次元のオルソ画像(解像度約1.5-3.5 mm)を作成することに成功しました。従来の音響測深によって得られる海底の3次元モデルの解像度は浅海域において50 cm程度であるため、本システムによってこれまで把握できなかった海底面の細かな凹凸まで捉えることが可能となりました。また同時に、得られた大規模な画像データから、U-netを利用したサンゴの分布範囲を自動的に識別する人工知能(AI)を開発し)、解析時間を大幅に削減しました(自動で1枚(約3.2 m2あたり)0.057秒程度)。従来のサンゴ礁の分布調査などではダイバーによる潜水や海中ロボットを用いた調査などが行われていますが、効率や安全性、コストの面などで課題がありました。SSSによって迅速で広域な海底調査が可能になるため、海洋開発や気候変動などが海洋環境に及ぼす影響をより正確かつ客観的に把握できることが期待されます。将来的には、サンゴや海草藻場、海洋ゴミ、水産資源の分布範囲の把握や電力供給用の海底ケーブル敷設計画・維持などに利用予定です。

Speedy Sea Scanner-portable (SSS-P)
スーツケースが2つあれば持ち運べる、可搬性の高いSSSです。メタルプレートで構成された1枚の翼に5台の光学カメラ(耐水深50 m)が搭載されており,尾翼で姿勢を維持します。カメラアレイのベースラインは3.0 mであり、等間隔でカメラが配置されています。これまで海中ロボットなどの持ち込みが困難であった離島や途上域沿岸などにおける海底環境調査が進むと期待されます。

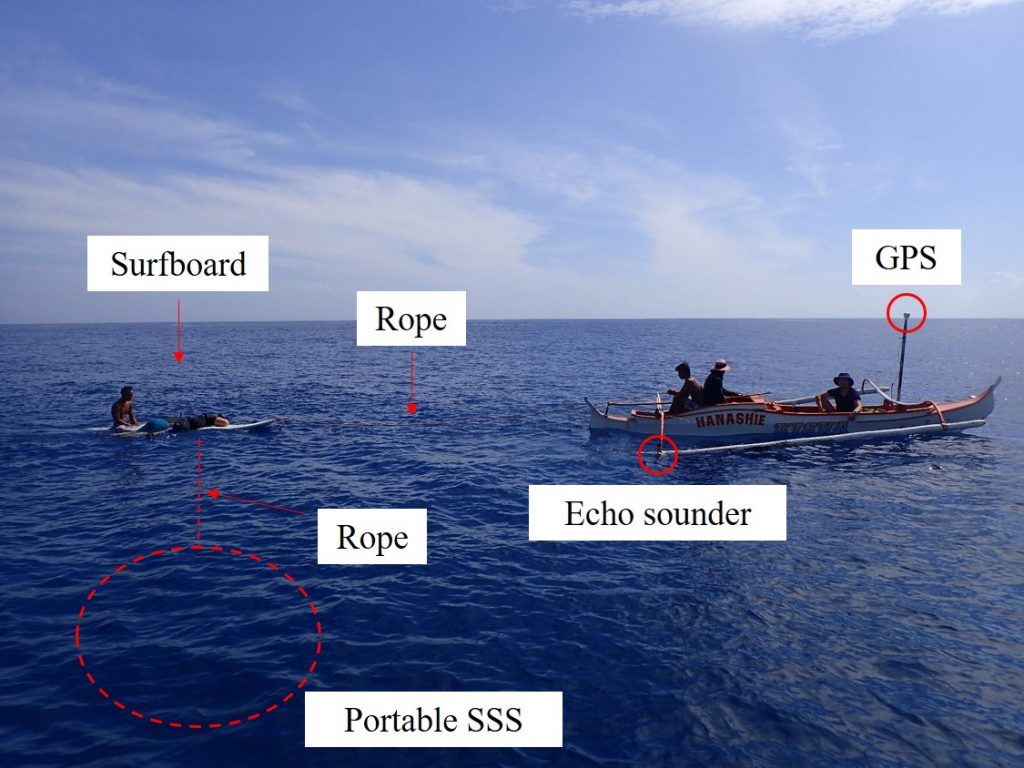
Speedy Sea Scanner-prototype
SSSの試作品です。防水のデジタルカメラをサーフボードに取り付けただけの簡易なシステムですが、この試作品から全てが始まりました。

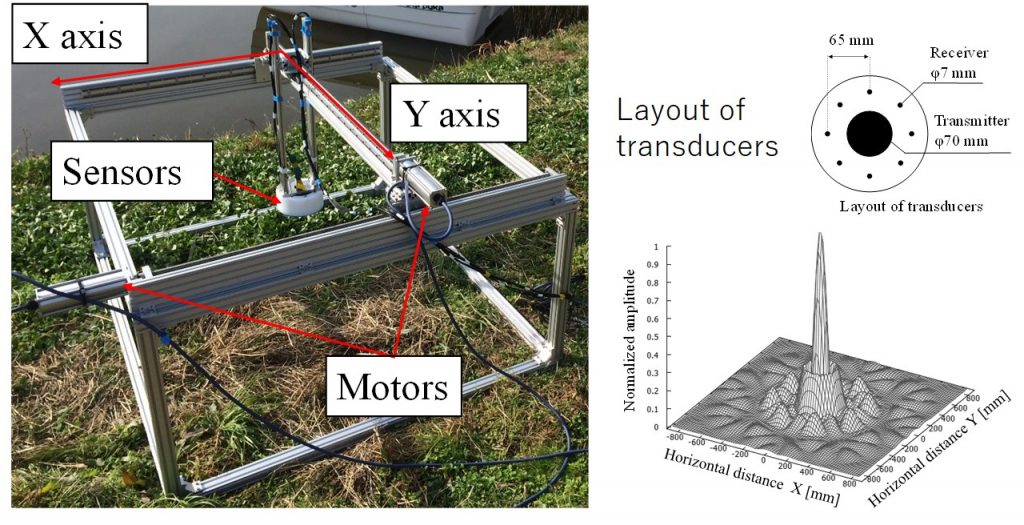
3D Acoustic coring system (3D-Acore)
環境改変が短期的あるいは長期的に海洋環境に与える影響も懸念されています.それらの影響評価のために,これまで各国において,水中カメラや音響計測機器などを利用した海中・海底表面のモニタリングが試行されており,環境影響評価の観点から様々な知見が得られてきましたが,海洋という過酷な計測環境もあり,依然として得られる情報は限定的です.その中でも特に,海底下(堆積物中)への環境影響については未だ不明な点が多く残されています.海底には古来より数多の底生生物が生息し,それらは海洋生態系・物質循環を考える上で極めて重要な環境要因です.また,アサリやシジミなどに代表される二枚貝などは,水産資源としても価値が高いです.しかし,その多くは常に堆積物中に潜っているため,個体数の把握やその行動観察は困難であり,必然的に調査には時間やコストを要します.また,現在のサンプリングに依る手法では広い面積を扱えず,経時変化も捉えづらいため,現状では堆積物中を効率的に調査し,その生物相や環境動態をモニタリングするための適当な対応技術が無いことが大きな課題です. 当研究室では,以前から海底下の情報を効率的に取得するには透過性の良い「音波」が有効であると考えており,2013年頃から計測対象の深度や大きさに合わせた「海底下空間可視化技術の最適化」に関する研究を行ってきました.特に,堆積物中の音波伝搬特性(音速と減衰)は土質性状や周波数によって著しく変化するため目的に合わせてシステムを最適化することが最も重要です.しかし,堆積物中は粒子と間隙流体からなる多孔体媒質であるため音波伝搬は極めて複雑であることに加え,文献情報も少なく,設計手法も確立されていなかった.そのような状況下で,申請者は音響計測技術を応用した「堆積物内3次元可視化システム」の開発を世界に先駆けて進めており,その基礎技術を独自に開発してきました。ソナーの設計を行っている研究室は国内でも有数です。
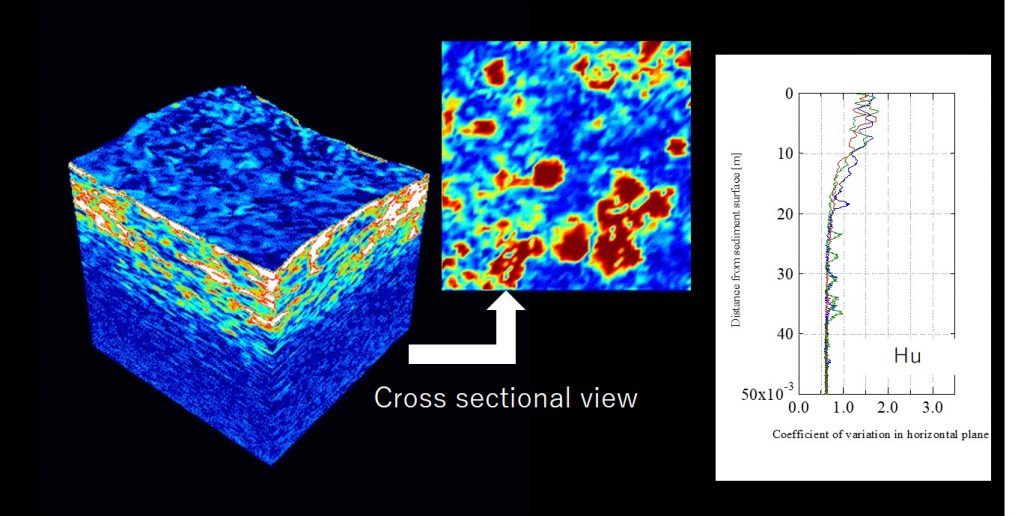
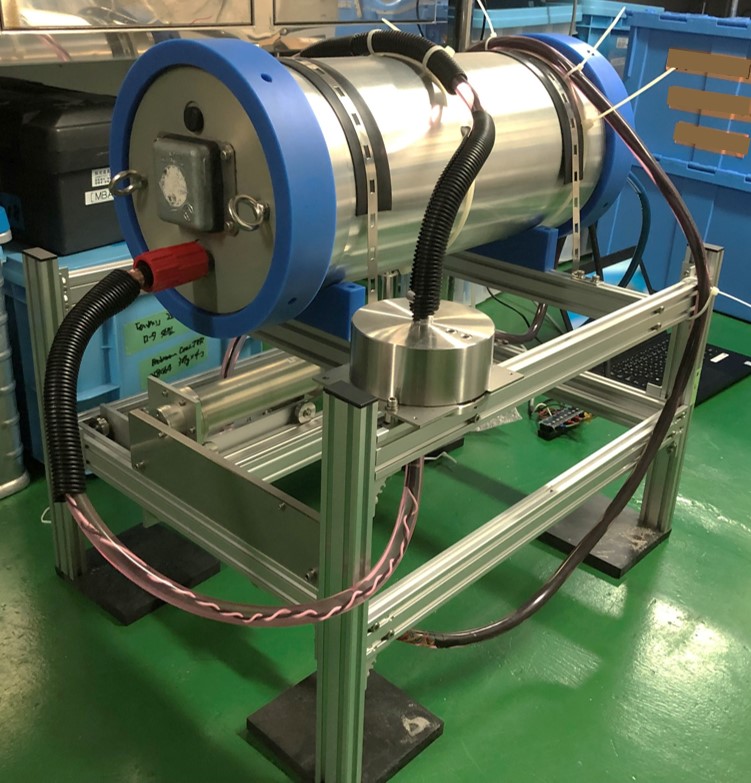
先ず始めに開発したのが「3次元音響コアリングシステム(3D Acoustic coring system)」というシステムです。本システムは,防水の2軸ステージ駆動部と音響計測部から構成され,Labview (National Instruments, Texas)をプラットフォームとして開発したソフトウェアによって制御されます.事前にプログラムした2次元平面の計測領域内で音響計測部を自動走査しながら音響データを取得し,計測後,専用に開発した3次元音響画像構築ソフトによって音響データを可視化します.送受波器の指向性は約4.6°である。本システムを用いることで、堆積物中を非破壊で3次元的に可視化することが可能になります。
Acoustic coring system-2000 (A-core-2000)
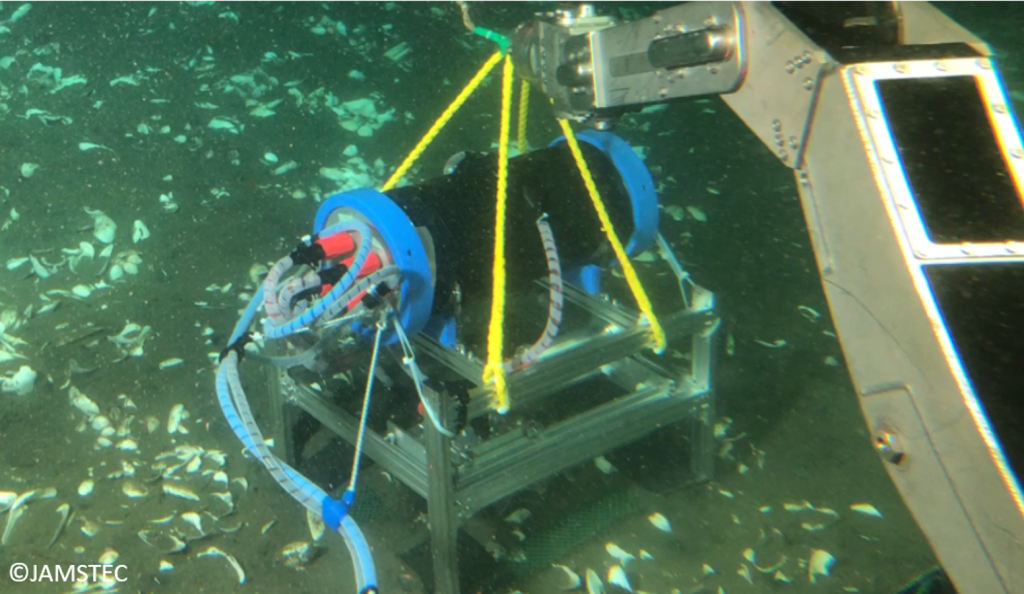
深海の海底下を調査するためのシステムです。耐水深2000mで海洋研究開発機構(JAMSTEC)の深海探査機に搭載して調査することが可能です。

3D Acoustic coring system-Large (3D-Acore-L)
より大きな埋没物を探査する際に利用します。計測範囲は水平方向に2.5m×2.0mです。

Acoustic Mole-64 (AM64)
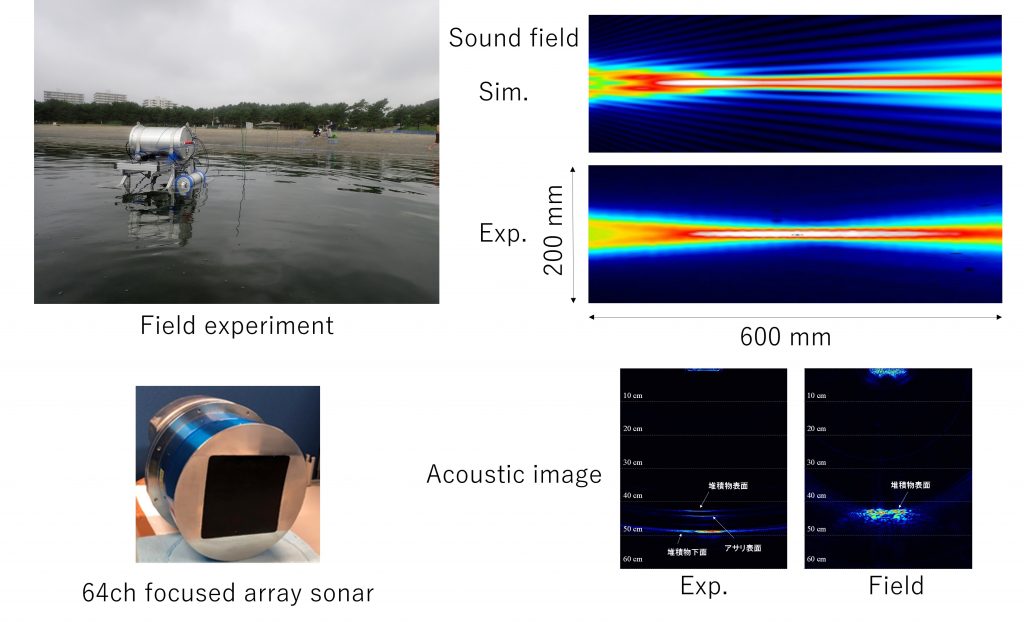
64チャンネルのアレイソナーを搭載しているクローラータイプの新しい音響計測システムです。水深200 mまで対応可能で,海底下の生物相や海底ケーブル,埋没遺跡などの調査に応用される予定です.発信される音波は中心周波数500 kHzで,集束点ではビーム幅は1 cm程度となり,微小な埋没物の探査に適しています.今後,中心周波数100 kHzのソーナーの開発も計画されており,ソーナーヘッドを付け替えることで用途に合わせた柔軟な調査が可能となります.この様なシステムは世界でも前例がなく,基礎的な試験を積み重ねながらその実用化を目指しています.

水域IoTシステム
人類が魚類へ及ぼす影響を把握するため、全方位ソナーと光学画像データを用いて、魚類の動態をリアルタイムで計測するための機器を開発しています。


イメージングソナーを用いた環境計測
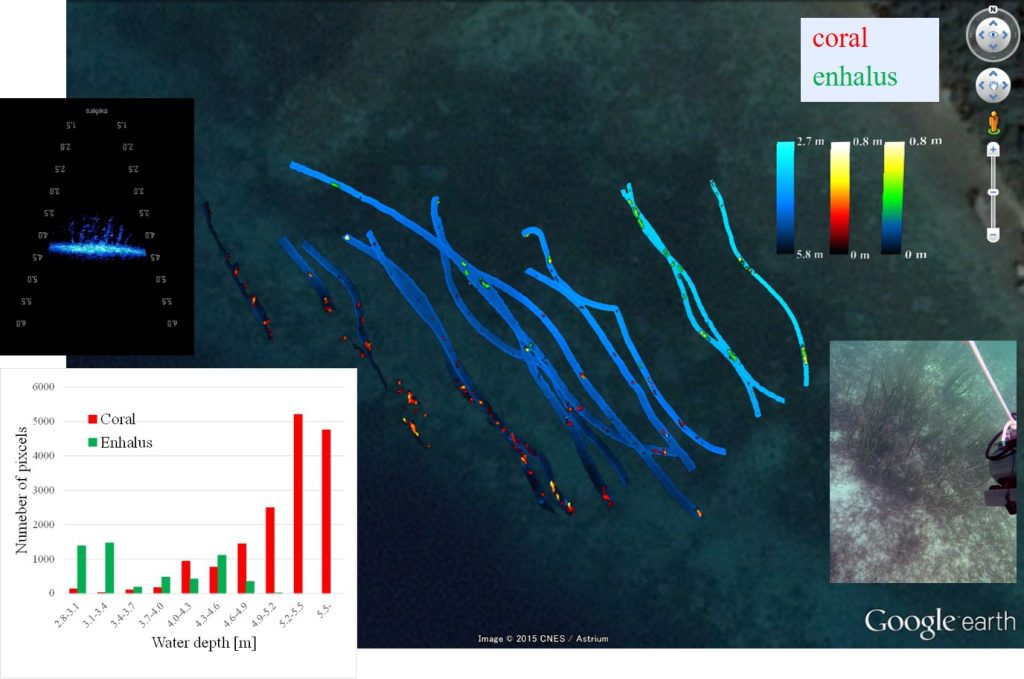
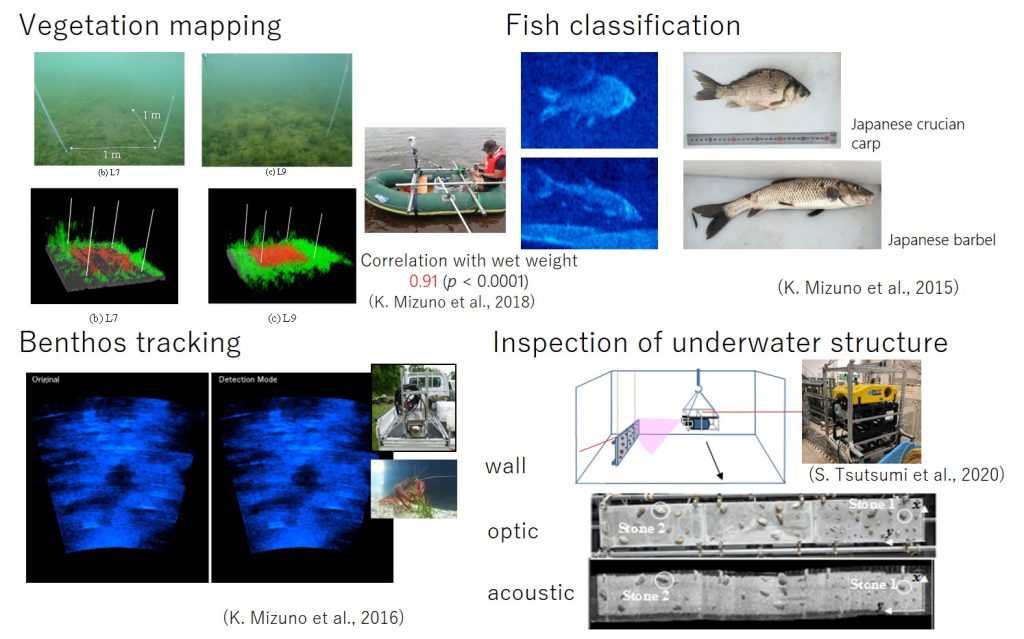
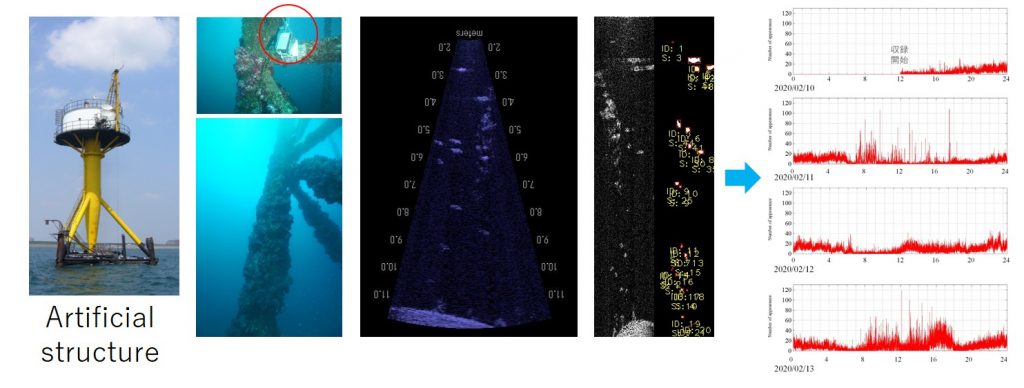
光が届きにくい水中では、音波が有効です。音響ビデオカメラと呼ばれるイメージングソナーを用いて、環境情報を効果的に抽出するための各種情報処理技術を開発しています。最近では、ブルーカーボン量の高精度な計測に資する、音響による海藻・海草のバイオマス量推定手法の開発や、海洋構造物周りの魚類の生態調査などにも応用しています。フィールドデータへの画像認識、画像分類、画像連結技術の応用を進めています。

Photographer: Ryusuke Honda