国際共同研究強化B(20KK0238)の事業内にて訪英(サウサンプトン大学、国立海洋センター)したので、広く参考のためにその記録を留める。
9/10(日) 記:小野里(東京大学)
旅程
7:00 羽田空港第3ターミナル集合
搭乗手続き・保安検査・出国審査
基本的な手続きは搭乗券とパスポートを機械に通せば完了する。ただ、人がいないので機械に通したときにパスポートや搭乗券を取り忘れないように自分で気をつける必要がある。

Figure 1.羽田空港搭乗ゲート
9:30 羽田空港離陸
14時間25分
ベーリング海峡から北極海を抜けてロンドンへ
15:50 ヒースロー空港着陸

Figure 2. ヒースロー空港
空港から地下を通ってバス停へ。
バス停へ・バス遅れ・遅刻や出発時刻の案内はない。
18:00 ヒースロー空港出発

Figure 3. バス停
1時間ぐらいヒースロー空港全体をまわってからサウサンプトンへ
20:30 サウサンプトン到着
バスから5~6分でホテル

Figure 4. 到着直後のサウサンプトン
21:00 チェックイン

Figure 5. モクシーホテル外観
9/11(月) 記:門井(横浜市立大学)
街中の様子

(メモ)
- 信号はボタン式になっていたが、通行人のほとんどが使用せずに車が通っていないタイミングで渡っていた。⚠︎ボタンを押して青信号になってから赤信号になるまでの間隔が短いので要注意。
- 宿泊ホテルの近くには大きな公園(Watts Park, East Park, Palmerston Park, Houndwell Park)があり、散歩にピッタリ。鳩や海鳥が多くいて、ベンチもたくさんあった。リスがいた。
- 宿泊ホテル近くのスーパーマーケットASDAで買い物をした。パンは比較的安い。
- 多くの施設で回転扉を採用している。
- 昼食は宿泊ホテルの目の前にある大きなデパート(JOHN LEWIS)のフードコートでマックを食べた。値段は日本の1.5倍程度で日本にはないメニューもあった。
- 洋服や靴屋、本屋など日本でいうイオンみたいな感じだった。
14:00 University of Southampton and NOC(National Oceanography Centre)
Solan先生への挨拶、施設・研究設備紹介

(メモ)
- 来週使う設備の紹介。水槽はCO2濃度と温度を管理している。屋外に小さい水槽やふるいがある。詳しいことは明日以降打ち合わせ。
- CO2濃度の調整など実験にはリスクが伴う。リスク管理には注意を払うこと。
17:00 夕食
9/12(火) 記:小野里(東京大学)
9:00 ホテル出発
9:30 実験準備開始
ソナーの組み立てと実験室の整備
日本から持ってきたソナーを組み立てて動作確認を行った。
実験室の荷物や古い海水を外に運搬した。新しい海水を昨日案内してくれた水槽の蛇口から注いで持ってきた。
研究員のトムさんたちがいろいろ協力してくれるらしい。

Figure 1. ソナーの動作確認の様子

Figure 2. 実験で使用する水槽
11:30 昼食
サンドイッチやパンはグレードごとに値段が設定されている。£3〜6ぐらい。
12:30 研究紹介

Figure 3.
野牧さん、水野先生、島崎さん、寺山先生、Solan先生が研究紹介を行った。
Solan先生は海洋生態学を専門としていて、カニが底を腕でかき回している様子などを見せていただいた。
19:00 夕食
学生でFish&Chipsにいった。
フィッシュアンドチップスと大量のポテト。£8.5。クレカ非対応現金のみ。

Figure 4. フィッシュアンドチップス
9/13(水)記:門井(横浜市立大)
午前 AUV/ROV/Glider見学@NOC

小型のAUVが複数ある。小型のため、3人程度いれば操縦可能となる。電気自動車に搭載されるようなバッテリーを積んでいて電気の容量は確保できるため、1~3ヶ月の航海を可能にする。ただ、INSは消費電力が大きいため搭載されておらず、定期的に浮上してGPSで位置情報を取得する。
このAUVは底にカメラが付いており、海底をマッピングできる。取得した情報を通信で遠くに送ることができるが時間がかかってしまう。そのため、AUV内で画像の取得制度を自己評価したり、代表的な写真を見つけて圧縮して送ったりする。
減税の使用量は1日あたり数百万とコスト回収のためかなり高くなっているが、将来的にはAUVを量産して低コストで運用することを目的とする。
IsisはROVで深海まで行ってサンプル採取やデータ取得を行うことができる。

13:30 OCEAN INFINITY

テクノロジーを駆使して、海上でのオペレーションを変革し、人々と地球の繁栄の実現を目指している企業。最初に安全確認のための動画を観て、OCEAN INFINITYの説明、施設見学を行った。施設の中は天井が高く部屋と部屋の区切りがないような感じで広々と仕事をできる環境が整っていた。オペレーションを行うスペースは少し薄暗くなっていて、20人くらい作業できるようになっていた。一人につきゲーミングチェアのような椅子とモニターが6台使用できるような環境が整えられていた。

16:30 サウサンプトン大学Blair先生研究室訪問
Blair先生の所有している2箇所の研究室を回った。1箇所目は新しくできたところで、メンバーはそこで作業しているらしい。海中で使用するアームや潜水ロボットなどを見せてもらった。また、少し離れたところにも部屋があり、1人でも作業できるようガラス張りの部屋となっていた。
9/14(木)記:小野里(東京大学)
水野先生、寺山先生、門井、小野里→Sonardyne
島崎、立木、藤丸→実験準備
9:30 サウサンプトン大学Blair先生
Blair先生の車で1時間ぐらいかけてSonardyneに向かう。
10:30 Sonardyne到着

Sonardyneは1970年代に水中音響を中心に創設された会社である。
午前中は開発現場を見せていただいた。施設はいくつかのスペースに区切られていた。また、施設や設備は比較的新しい印象を受けた。試験用水槽は円形で1~2階分の深さがある。
昼食から午後にかけて社員からSonardyneについて説明を受けた。現在ではソナーだけではなく、環境計測や海中ロボットなど海洋工学にまつわることを広くやっている。
15(金)記:門井(横浜市立大)
9:30 実験準備

Figure 1. 計測の様子

Figure 2 計測に使うゴカイ
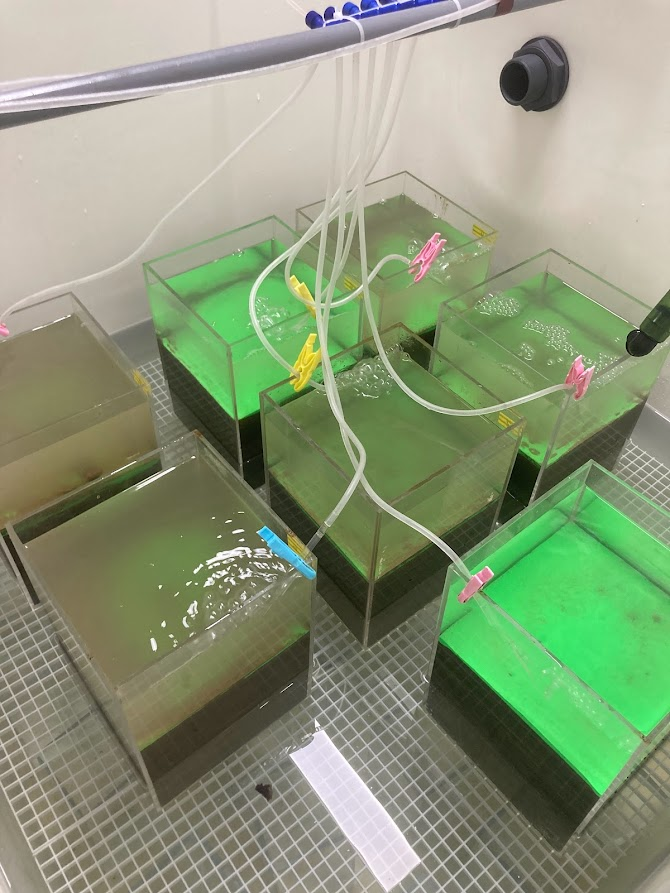
Figure 3. 水槽のセッティング
前日までに水槽の砂を用意した。層が重なっているのが確認できる。層と着色した砂で撹拌を観察するらしい。本日は何も入れていない状態での音響反射計測、撮影、セッティングを行った。音響反射計測はゴカイを入れる前の水槽それぞれがどのように反射しているのか計測を行った。作業ごとに場所を変えるのでなるべく混ざらないように運搬しなければならないのが大変だった。セッティングで、大きなタンクに水槽をいれてゴカイを放すところまでで終了した。